
15322881821
EN
全国咨询热线
15322881821近日,东莞张力测控技术有限公司交付给银河航天(西安)科技有限公司的转动单元测试系统设备已完成交付并投入使用。随着科技日新月异的发展,机器人行业的发展已经势不可挡。机器人已经广泛应用于餐饮,建筑,工业生产等行业。而由东莞张力测控技术有限公司定制的这套转动单元测试系统就是针对机器人关节电机中的一个重要部分——舵机的测试而研发制造的。
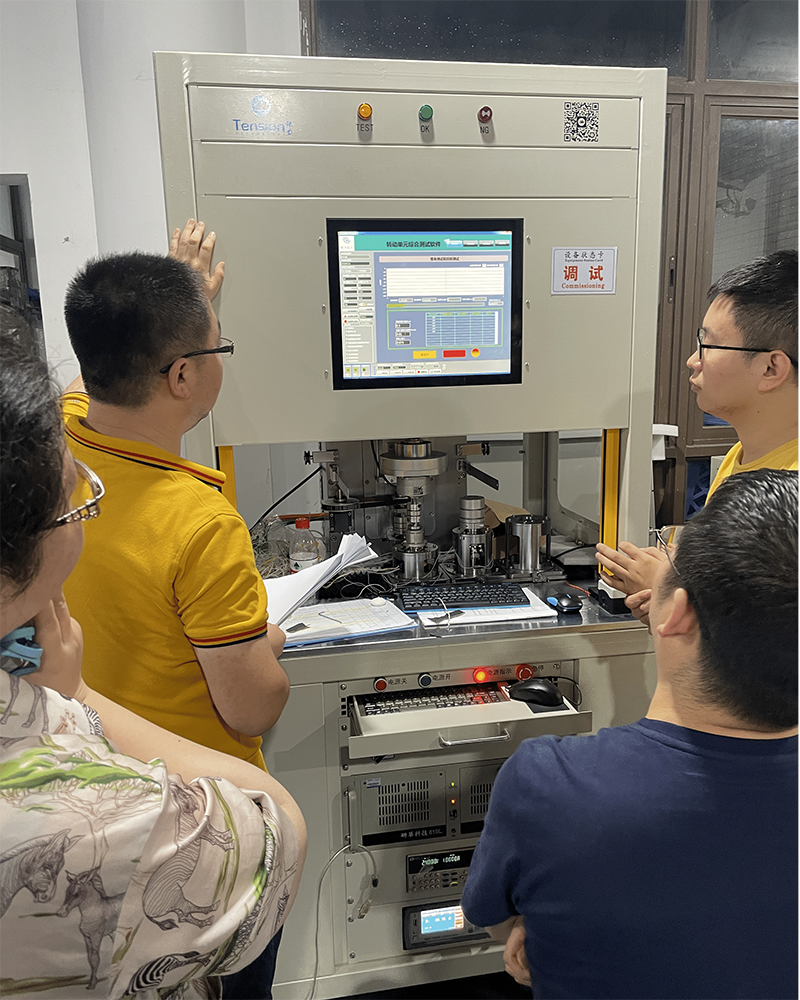

设备现场调试及展示图
测试系统设备介绍
转动单元测试系统由加载系统部分(包含负载电机;伺服驱动器;扭矩传感器;角度传感器)、 转动单元测控系统部分(包含工业控制计算机;加载控制器;电机供电电源)、辅助单元(包含测试线缆;PLC;进给电机;测试机架;测试工装等)以及相应的转动单元测试软件等组成。测试软件用 LABVIEW 编写,能够实现电阻测试,跑合同心度测试,启动电流测试,转动精度动/静态测试,位置准确度和位置重复性测试,摆角测试和扭矩测试,输出力矩测试,断电保持测试等舵机特性相关的测试。(软件是可以根据需求定制的)。
1.摆角测试和扭矩测试:
在转动单元使能状态下,往转动单元轴左右施加一个力,测量角度变化。可在各个位置下进行测量。

输出力矩测试:
当用于测试转动单元力矩测试时,测试软件开环控制被测转动单元连续运转,同时测试软件根据用户设定加载扭矩值通过PID控制伺服电机输出至用户的设定扭矩,通过采集测试台上的角度传感器的值,来判断被测转动单元在额定负载情况下能否正常运转,电流是否在设计的额定电流允许偏差范围。

电阻测试:
设定每个电阻项的电阻下限,上限(不设置即为不进行判定),点击开始测试,即可测试出每个电阻的阻值并进行判定,并在测试结果显示合格或不合格。如果全部电阻项目合格,会显示绿灯,其中有一个电阻项目测试不合格则显示红灯。

跑合同心度测试:
通过测试软件控制被测电机驱动来驱动被测产品运转在设定转速和角度下动;各密封处、 各结合处是否漏油、渗油;运转是否平稳,是否发生冲击、异响等。同时通过磁吸式振动传感器采集被测转动单元机械转态是否平稳。

启动电流测试:
点击开始测试后,直流电源从起始电流开始,在每一个限制电流下使转动单元启动,判定转动单元是否运转,如果运转,根据设置的启动电流上限值进行判定。否则,逐步递增直流电源的限制电流,直到转动单元运转或到达最大的限制电流。

转动精度静态测试:
设置起始角度,终止角度,角度递增,负载力矩等,转动单元从初始角度开始,按照角度递增,运行到每一个位置,读取当前位置的基准角度,旋变角度,计算出旋变角度正负最大误差和静态转动精度(将旋变角度误差进行RMS计算得出)。

转动精度动态测试:
从起始角度开始,按照一定速度运行到终止角度,实时采集旋变角度和基准角度,并计算误差,并将最终所有数据计算出旋变角度正负最大误差,和动态转动精度,计算方法与转动精度静态测试相同。

位置准确性和可重复性测试:
通过设定负载力矩,转动单元速度,位置,循环次数,转动单元在不同的工况下往复运行,测量转动单元的控制精度。

断电保持测试:
测试软件控制转动单元的步进电机断电,测试软件控制加载电机逐步从 0Nm 施加外部载荷至设定扭矩来拖动转动单元输出轴同时记录此时的扭矩传感器数值、转动单元旋变数值,测试系统的光电编码器器数值。当转动角度大于某数值( 如 0.1° )而负载力矩小于设定值(如 1.5N.m) 时视为不合格,当转动角度小于某数值(如 0.1° )而负载力矩大于设定值(如 2.5N.m)时视为转动单元内部卡死为不合格。

微信扫一扫 立即关注

扫码下载张力测控画册